移動機器人行業(yè),究竟困在何處?
對此,擁有15年從業(yè)經(jīng)驗的杭叉集團首席科學家陶熠昆一語道破癥結(jié)所在:當前看似競爭激烈的移動機器人市場,實則由于滲透率極低,仍處于藍海階段;而產(chǎn)業(yè)破局的關鍵,正藏在從AMR向EIMR(具身智能移動機器人)的范式躍遷新方向之中。

“紅海”假象與破局之路
在移動機器人產(chǎn)業(yè),“紅海”早已是行業(yè)掛在嘴邊的高頻詞。價格持續(xù)下探、參數(shù)內(nèi)卷加劇、交付周期一再壓縮,種種行業(yè)表象,很容易讓人得出“市場競爭過度、增量機會稀缺”的結(jié)論。但在陶熠昆看來,這是一種需要被打破的行業(yè)假象。
“一個整體滲透率尚不足3%的行業(yè),本質(zhì)上仍處于產(chǎn)業(yè)早期階段,遠沒到真正意義上的‘紅海’。”陶熠昆直言,行業(yè)普遍體感艱難,不是市場增量空間已經(jīng)耗盡,而是整個產(chǎn)業(yè)仍被三重結(jié)構(gòu)性約束牢牢困住——部署成本較高、場景適應性差、高度依賴結(jié)構(gòu)化指令,這才是行業(yè)發(fā)展的真正瓶頸。

陶熠昆逐一拆解了這三重約束的核心影響。首先是部署成本問題。當前移動機器人在工業(yè)場景的落地模式,與早期智能駕駛高度依賴高精地圖的階段極為相似。其落地需要搭建類似“高精地圖”的現(xiàn)場基礎設施,這一過程產(chǎn)生的高昂成本也遠超普通工廠的承受能力。
其次是非標化帶來的系統(tǒng)復雜性。移動機器人產(chǎn)品本身趨于標準化,但實際應用場景卻高度碎片化。一旦場景發(fā)生變化,就需要進行非標定制,而大量定制代碼不斷堆砌,極易引發(fā)“規(guī)則爆炸”,導致系統(tǒng)邏輯沖突、難以維護且無法復用,讓行業(yè)陷入非標化困境,阻礙規(guī)模化發(fā)展。
此外,當前的移動機器人高度依賴結(jié)構(gòu)化指令。自然語義指令只能通過WMS等上層系統(tǒng)解析為具體的物流任務,如貨物搬運、存儲、分揀等,明確任務優(yōu)先級、時間要求和目標位置后,才能被移動機器人執(zhí)行。
這三重約束疊加,構(gòu)成了行業(yè)發(fā)展的“隱形天花板”,也正是智能叉車等核心產(chǎn)品滲透率長期難以提升的根源。問題的關鍵從來不在市場需求,而在底層的技術與產(chǎn)業(yè)范式。
也正是在這樣的行業(yè)背景下,具身智能的產(chǎn)業(yè)價值被重新審視。過去兩年,人形機器人概念帶火了“具身智能”,但在陶熠昆看來,真正實現(xiàn)具身智能大規(guī)模商業(yè)落地的場景是已經(jīng)完成產(chǎn)業(yè)驗證的智能駕駛。
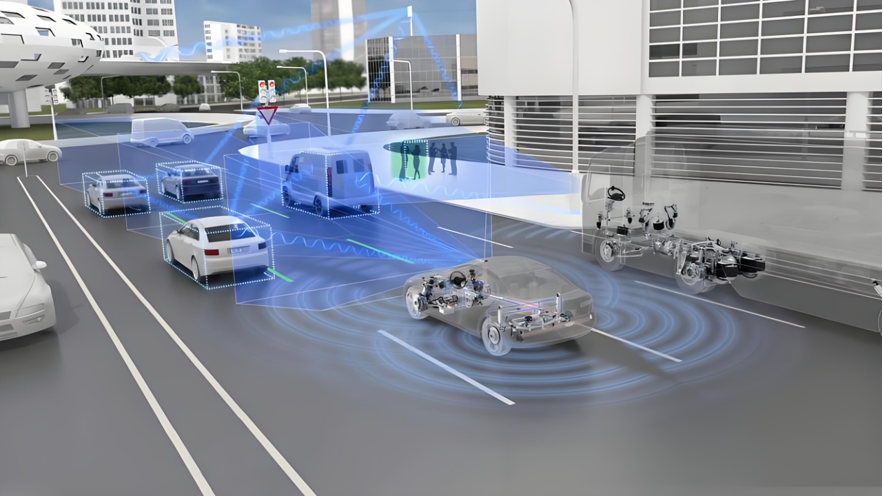
陶熠昆指出,“汽車產(chǎn)業(yè)以硬件為載體,持續(xù)出貨獲取數(shù)據(jù),通過海量數(shù)據(jù)訓練模型,再反過來提升系統(tǒng)能力,形成正向循環(huán)。”這無疑是一條已經(jīng)被跑通的路徑。智能駕駛的核心突破,不只是單點技術的升級,而是構(gòu)建起了“載體—數(shù)據(jù)—模型”的完整正向閉環(huán),讓數(shù)據(jù)飛輪真正轉(zhuǎn)動了起來。
他梳理了智能駕駛十年來的演進路徑。智能駕駛從2013年發(fā)展至今,已完整經(jīng)歷四個階段。第一階段,依靠SLAM、幾何感知、傳統(tǒng)規(guī)控,實現(xiàn)“能開”;第二階段,依賴高精地圖、圖像領域語義感知、Rulebased規(guī)劃控制,實現(xiàn)有限區(qū)域(如高速)的智能駕駛;第三階段,轉(zhuǎn)向“重感知、輕地圖”,城市智駕成為可能,但傳統(tǒng)規(guī)控陷入規(guī)則爆炸,開得“不那么好”;第四階段,端到端模型上車,在絕大部分路況下決策合理、安全,大規(guī)模商業(yè)落地成為現(xiàn)實。
歷經(jīng)這四個階段,智能駕駛完成了一次關鍵躍遷——從“規(guī)則驅(qū)動”走向“數(shù)據(jù)驅(qū)動”。這一轉(zhuǎn)變不僅是算法層面的升級,更意味著系統(tǒng)能力的生成方式發(fā)生了根本變化,不再依賴人為窮舉規(guī)則去覆蓋場景,而是通過數(shù)據(jù)訓練模型,讓系統(tǒng)具備在復雜環(huán)境中的泛化能力。這一拐點,決定了智能駕駛從“可用”走向“好用”,并最終走向規(guī)模化。
而移動機器人,目前仍停留在這一演進路徑的前半段。無論是對環(huán)境的依賴程度,還是對規(guī)則系統(tǒng)的依賴方式,都與智能駕駛的早期階段高度相似。這意味著,其下一階段的發(fā)展方向并不模糊:需要從“規(guī)則系統(tǒng)”走向“數(shù)據(jù)驅(qū)動”,從“場景適配”走向“能力泛化”。
在他看來,具身智能正是這場范式切換的核心抓手。一方面,移動機器人要完成從AMR向EIMR(具身智能移動機器人)的躍遷,必須靠具身智能賦予更強的感知、理解與決策能力,才能在更開放、更復雜的工業(yè)環(huán)境中穩(wěn)定運行;另一方面,具身智能的迭代,離不開能持續(xù)產(chǎn)生真實場景數(shù)據(jù)的落地載體,而工業(yè)移動機器人恰恰是工業(yè)領域少數(shù)具備規(guī)模化落地潛力的載體。
陶熠昆最終給出了他對行業(yè)破局的核心判斷。移動機器人的出路,從來不在繼續(xù)壓縮成本、優(yōu)化局部性能的存量內(nèi)卷里,而在完成一次底層的范式切換。只有當行業(yè)真正擺脫對環(huán)境改造、人工規(guī)則、結(jié)構(gòu)化指令的深度依賴,建立起以數(shù)據(jù)和模型為核心的能力體系,才有可能跨越當前的產(chǎn)業(yè)瓶頸,進入規(guī)模化發(fā)展的全新周期。
這條路,既有時間窗口,又有技術可行性,還有產(chǎn)業(yè)基礎支撐。陶熠昆的判斷冷靜而務實,這并非賭未來的盲目探索,而是一條已被驗證的可行之路。
智駕技術范式遷移的“甜點”與“硬菜”
論證了方向之后,陶熠昆將目光轉(zhuǎn)向具體的遷移路徑——智能駕駛的技術成果,哪些能直接平移到工業(yè)移動機器人領域,哪些照搬會水土不服?他用“甜點”和“硬菜”的形象比喻,清晰劃分出這場跨界遷移中,確定性的機會與繞不開的硬核難題。
在陶熠昆看來,這場技術遷移里最大的“甜點”,無疑是“重感知,輕地圖”的技術范式。他指出,當前移動機器人的部署落地,需要通過SLAM構(gòu)建地圖,標注路網(wǎng)拓撲與交通規(guī)則,再用精確3D坐標示教每一個作業(yè)點位。這套流程與早期自動駕駛高度依賴高精地圖的范式如出一轍。而高精地圖雖能彌補早期感知短板,但其前后期制作與維護的成本,始終占據(jù)施工成本的核心部分,成為行業(yè)規(guī)模化落地的最大掣肘。
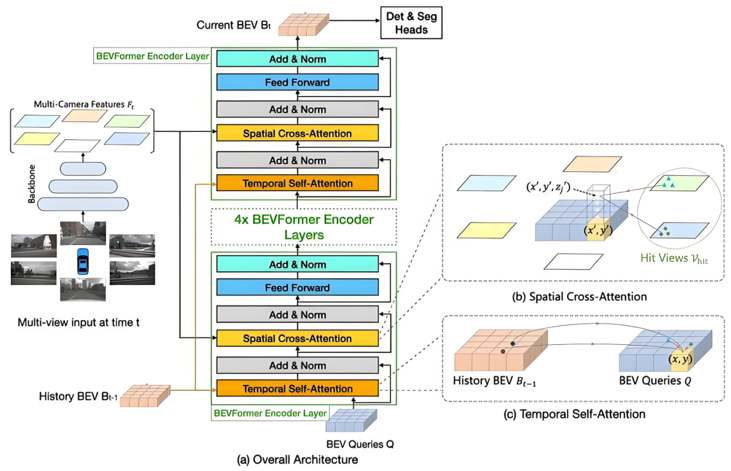
這個行業(yè)難題,陶熠昆認為,智能駕駛行業(yè)已用數(shù)年探索蹚出了破局之路。他談到,早年智駕同樣困于高精地圖與車路云協(xié)同的高成本,難以實現(xiàn)城市級落地,最終在城區(qū)智駕場景中找到了“重感知,輕地圖”的路徑——通過 BEV/OCC 等在線感知網(wǎng)絡,實時生成局部環(huán)境信息,用在線感知替代對預繪高精地圖的強依賴。“從高速駛?cè)氤鞘校邱{能力的規(guī)模化擴張,本質(zhì)上就是‘重感知、輕地圖’的勝利。”
陶熠昆判斷,這套范式向移動機器人行業(yè)的遷移,價值是顛覆性的。它能大幅壓縮部署成本,讓機器人擺脫預繪靜態(tài)地圖的束縛即可穩(wěn)定運轉(zhuǎn)。這是當前技術遷移中,最易落地、確定性最高的一步,是當之無愧的核心“甜點”。
但技術遷移的路上,并非全是可以輕松摘取的“甜點”,還有兩道無法回避、必須沉下心啃透的“硬菜”。
第一道需要啃下的硬菜,是智駕技術范式與工業(yè)具身感知之間,精度與粒度的量級差距。陶熠昆直言,汽車智駕的技術范式生來為道路場景設計,常規(guī)行駛中亞分米級精度已能滿足安全需求,即便是精度要求最高的自動泊車,行業(yè)頂尖方案也僅能做到5厘米以內(nèi)的控制精度。但在工業(yè)作業(yè)場景中,貨叉插取托盤、精準對準庫位這類高頻操作,要求的是亞厘米級控制精度,1厘米的誤差就可能導致作業(yè)失敗,甚至引發(fā)安全事故。“整整一個數(shù)量級的差距,絕不是簡單技術移植就能彌合的,這是行業(yè)必須直面的核心挑戰(zhàn)。” 即便業(yè)界已在探索多條技術路線填補鴻溝,但并無現(xiàn)成方案可用,每一條路線都需要工程層面的持續(xù)突破。
第二道繞不開的硬菜,是工業(yè)場景特有的數(shù)據(jù)效率難題。陶熠昆指出,工業(yè)車輛與移動機器人行業(yè),天然具備高定制、小批量的行業(yè)屬性,這讓數(shù)據(jù)驅(qū)動的智能化,從一開始就面臨與智駕行業(yè)截然不同的底層困境。
一款熱銷的汽車,年銷量可以達到數(shù)十萬臺,整車的傳感器方案、車體構(gòu)型高度統(tǒng)一,海量的路測數(shù)據(jù)可以快速攤薄采集與模型訓練的成本;即便是當下火熱的大語言模型,其訓練所需的文本數(shù)據(jù),也天然存在于互聯(lián)網(wǎng)之中,采集成本極低。
但在工業(yè)領域,即便是叉車這類相對通用的品類,單款年銷量也難與乘用車型比肩,更不用說大量定制化產(chǎn)品,不同場景下的車體、傳感器、作業(yè)流程千差萬別。這讓企業(yè)始終面臨兩難:該選哪款產(chǎn)品、哪個場景采集數(shù)據(jù)?巨額成本換來的數(shù)據(jù),一旦方案調(diào)整,還能否跨平臺復用?
陶熠昆透露,杭叉的核心攻關方向,正集中在構(gòu)建跨設備平臺的數(shù)據(jù)表示。在他看來,跨平臺數(shù)據(jù)復用的范式研究,必須提升到行業(yè)級的戰(zhàn)略議題,而非各家企業(yè)各自摸索的技術細節(jié),這也是工業(yè)移動機器人向具身智能轉(zhuǎn)型必須攻克的核心關卡。
陶熠昆始終強調(diào),從智駕到移動機器人,技術遷移的浪潮已然到來,但這場遷移從來不是簡單的“拿來主義”。唯有既抓牢可快速落地的“甜點”,也沉下心啃透屬于工業(yè)場景的 “硬菜”,才能讓智駕的技術紅利,真正在工業(yè)場景里落地生根。
智駕技術范式躍遷帶來產(chǎn)品形態(tài)躍遷
技術范式的轉(zhuǎn)變,最終會兌現(xiàn)為產(chǎn)品形態(tài)的轉(zhuǎn)變。在陶熠昆看來,移動機器人行業(yè)對“產(chǎn)品”的核心認知,已經(jīng)到了可以升級定義的時刻。
“過去,行業(yè)習慣以導航方式、避障能力等細節(jié)差異區(qū)分AGV與AMR,但這種表層的技術迭代,早已不足以定義從 AMR 到 EIMR(具身智能移動機器人)的范式躍遷。” 陶熠昆直言,兩代產(chǎn)品的真正分野,從來不在細枝末節(jié)的功能升級,而藏在底層邏輯的徹底重構(gòu)之中。
他清晰地劃定了二者的本質(zhì)邊界。AMR是規(guī)則驅(qū)動,依賴高精度地圖,執(zhí)行的是坐標指令,本質(zhì)是在構(gòu)建一套自動化系統(tǒng);而EIMR走向數(shù)據(jù)驅(qū)動或混合驅(qū)動,走“重感知、輕地圖”的感知網(wǎng)絡路線,靠語義指令運行,產(chǎn)品動機樸素得多——就是取代人工。放在車聯(lián)網(wǎng)的語境下,AMR離不開WMS、RCS這些上層系統(tǒng);而EIMR的目標,是把V2X里的那個“X”徹底拿掉,實現(xiàn)X=ZERO的單機自主。

基于這一認知,陶熠昆拋出了顛覆行業(yè)固有認知的判斷:移動機器人的進化方向,是從群體(系統(tǒng))智能走向單機(分布)智能。
長久以來,數(shù)百臺移動機器人的聯(lián)網(wǎng)調(diào)度,一直被行業(yè)奉為技術實力的象征,可陶熠昆卻發(fā)出了直擊本質(zhì)的追問:“我們反復提及的群體智能,到底代表的是高智能,還是高依賴?” 在他看來,多機調(diào)度的本質(zhì)是運籌學的指派問題,技術上限并不高,“真正難的,是讓一臺機器人不組網(wǎng)、不依賴任何外部系統(tǒng),獨立完成復雜作業(yè)。” 他坦言,只有具備真正單機智能的產(chǎn)品,才具備規(guī)模化復制的核心可能。
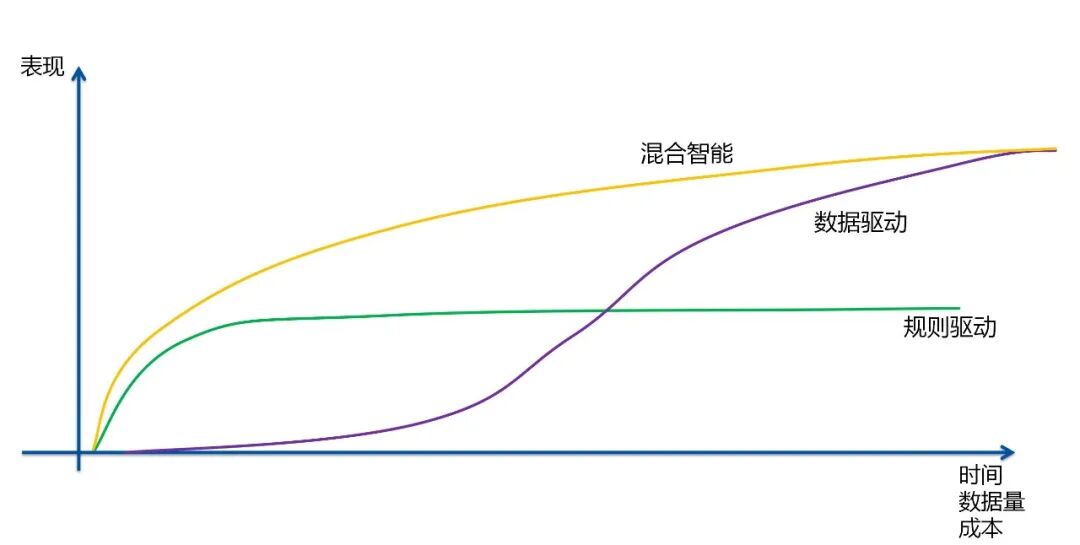
要實現(xiàn)這場范式跨越,陶熠昆給出了一條極為務實的過渡路徑:混合智能。他直言,行業(yè)遲遲難下決心全面轉(zhuǎn)向數(shù)據(jù)驅(qū)動,核心困局在于起步門檻的兩難。純規(guī)則驅(qū)動5天就能做出60分的產(chǎn)品,但上限極低;純數(shù)據(jù)驅(qū)動動輒需要千萬級別的數(shù)據(jù)成本,短期效果未必優(yōu)于規(guī)則方案,卻擁有無限的成長空間。“混合智能的價值,就在于既能靠規(guī)則快速落地,讓產(chǎn)品先進入現(xiàn)場用起來,又能完整保留數(shù)據(jù)驅(qū)動的成長上限。” 陶熠昆強調(diào),只要產(chǎn)品進入真實場景運轉(zhuǎn),數(shù)據(jù)飛輪就能被撬動,因此數(shù)據(jù)工程絕不該是算法團隊的內(nèi)部事項,而必須上升為企業(yè)的頂層戰(zhàn)略。
最后,陶熠昆還借用智能駕駛的分級體系,為行業(yè)畫下了清晰的演進路線圖。“現(xiàn)在行業(yè)里很多聲音說,AMR靠V2X實現(xiàn)了 L4 級無人化,可這本質(zhì)上是‘高代價的偽 L4’,是靠外部系統(tǒng)堆出來的自主,而非機器人本身的能力。”
在他的判斷里,EIMR的進化,反而要先主動“降級”。先徹底打破對V2X的外部依賴,退回L2級實現(xiàn)可靠的人機協(xié)同;再憑借具身智能的持續(xù)迭代,攀升至L3級,實現(xiàn)常規(guī)場景完全無人作業(yè),僅在特殊情況下需要稀疏人工干預;最終走向真正的L4級智能——具備極強的環(huán)境適應性,能理解并拆解自然語言指令,在密集、狹窄等非標準場景中實現(xiàn)全流程無人化作業(yè)。
陶熠昆直言,“當具身智能與移動機器人產(chǎn)品范式深度融合的那一刻,就是這個產(chǎn)業(yè)突破紅海、走向藍海的時刻。”